


Beyond CAP Theorem: Understanding PACELC for System Design Interviews
CAP vs PACELC: Understand why distributed systems must trade off consistency, availability, or latency, and how to navigate these choices.

This blog demystifies the CAP theorem and its extended counterpart PACELC – two fundamental concepts in distributed systems that explain why you can’t have perfect consistency and availability at the same time.
Imagine you have a social app that must always show the latest posts (consistency) and never go offline (availability).
One day a network glitch hits and some servers can’t communicate.
Do you stop updates to keep data uniform, or keep the service running with potentially stale data?
This scenario highlights the classic consistency vs. availability dilemma in distributed systems.
The CAP theorem is a famous guideline that basically says when a network partition occurs, you have to choose between consistency and availability – you can’t fully have both.
But that’s not the end of the story.
Enter PACELC, an extension of CAP that asks: even when the network is fine, would you trade some consistency for better latency (speed)?
In this blog, we’ll explore CAP vs. PACELC and see why both matter, especially if you’re preparing for system design interviews.
What is the CAP Theorem?
The CAP theorem states that a distributed system cannot simultaneously guarantee all three of the following: Consistency, Availability, and Partition Tolerance.
In simpler terms:
Consistency (C): All nodes see the same data at the same time. Every read gets the latest write, like having one up-to-date copy of the data across the cluster.
Availability (A): Every request to a non-failing node gets a response, even if the returned data isn’t the most recent. The system remains accessible (it doesn’t hang or throw errors outright during a failure).
Partition Tolerance (P): The system continues to operate despite network partitions. A partition is a communication break between nodes – a partition-tolerant system keeps going even if the network splits the cluster into parts.
According to CAP, you can only have two out of these three properties in a given moment.
And since real distributed systems cannot avoid partitions, you inevitably face a choice: consistency or availability during a split – you can’t achieve 100% of both.
For example, a traditional SQL database (ACID-compliant) typically favors consistency over availability – if it isn’t sure it has the latest data, it might block or reject some requests (making it a CP system under CAP).
Conversely, many NoSQL databases choose to remain available and return responses even if some data might be stale (making them AP systems).

A simple diagram of the CAP theorem. It shows that out of Consistency, Availability, and Partition Tolerance, a system can only guarantee two at the same time. In a partition situation, you must choose either C or A.
In practice, Consistency + Availability (CA) is only achievable in scenarios where partitions never occur (e.g. a single-node setup).
Once you distribute your system, partitions will happen, so you design for either CP or AP behavior.
For instance, Apache Cassandra is an AP system – it will prefer to give a fast answer from some replica (ensuring uptime) even if that data is slightly out-of-date.
By contrast, Apache HBase is CP – it would rather delay or fail certain requests during a network issue to keep all replicas consistent.
The CAP theorem frames this decision during network failures: you either tolerate some inconsistency or some downtime.
PACELC: Beyond CAP to Include Latency
CAP is great for understanding failure scenarios, but it doesn’t address what trade-offs exist when the network is perfectly fine.
In practice, even without outages, distributed systems often balance consistency vs. latency (response speed).
The PACELC theorem fills this gap by accounting for the latency factor in these trade-offs.
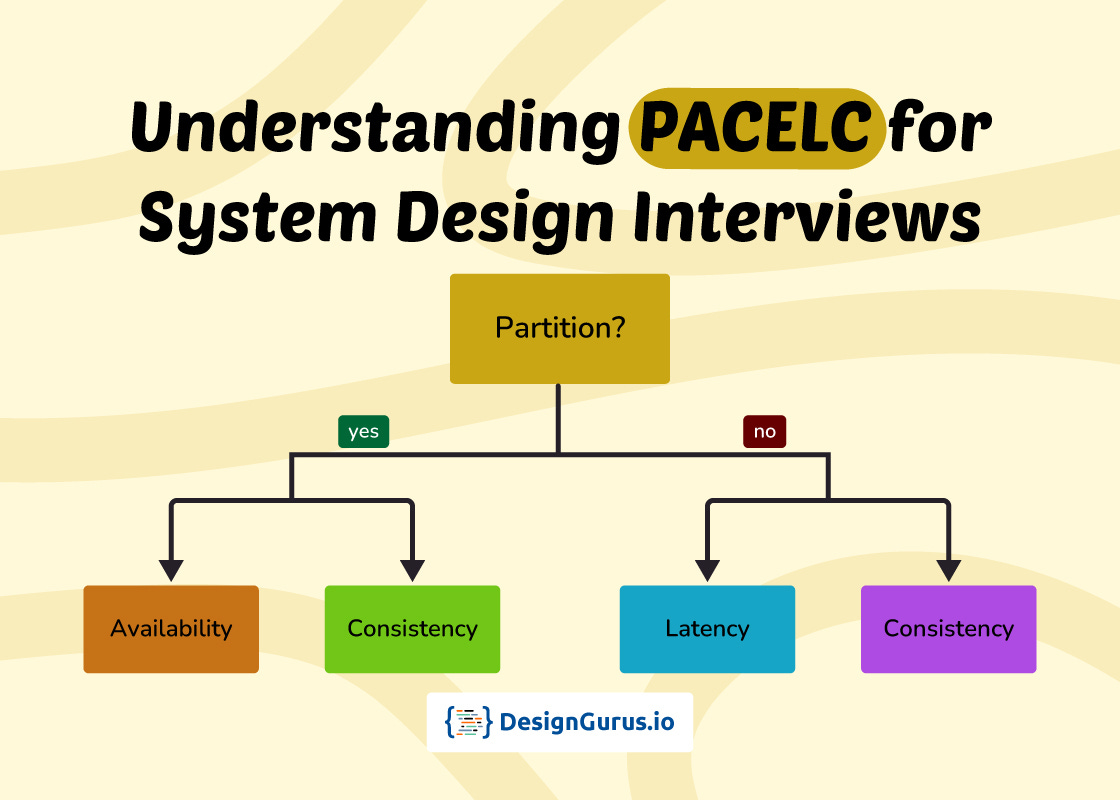
PACELC stands for “Partition – Availability or Consistency; Else – Latency or Consistency.” In a nutshell:
If a Partition (P) occurs: choose Availability (A) or Consistency (C) (just like CAP).
Else (no partition): choose Latency (L) or Consistency (C) during normal operation.
Simply put, even when the network is healthy, you face a choice: return responses fast at the risk of some stale data, or ensure strong consistency by making users wait longer (higher latency).
For example, under PACELC categorization, Cassandra is PA/EL – it prefers availability during partitions and opts for low-latency responses (with eventual consistency) when there’s no partition.
Google BigTable, meanwhile, is PC/EC – it sacrifices availability if a partition happens, and even in normal operation it prioritizes consistency over latency.
Keep in mind that these are guiding principles, not strict rules of physics.
PACELC doesn’t replace CAP; it builds on it.
CAP addresses the partition scenario, and PACELC adds the latency-vs-consistency consideration when things are running smoothly.
These frameworks help reason about design choices, but real systems often have techniques to mitigate or balance the trade-offs.
Why Does This Matter for Interviews?
For system design interviews, knowing CAP and PACELC helps you discuss trade-offs clearly.
Many design questions essentially ask you to choose between data accuracy and system availability under certain conditions.
With CAP in mind, you can frame your answer as a CP vs. AP decision and explain why.
For instance, a payment service should prefer consistency (CP) to avoid incorrect transactions, whereas a social network might favor availability (AP) for a better user experience.
Mentioning PACELC shows you’re aware that even without failures, there’s a latency vs. consistency aspect to consider.
This deeper insight can impress interviewers and demonstrates a solid grasp of distributed system fundamentals.
Conclusion
If there’s one big takeaway, it’s this: CAP tells you what breaks during a partition (you must choose consistency or availability), and PACELC tells you what you trade in the happy path (latency or consistency).
Together, they form a practical lens for explaining real system behavior.
You’re not chasing a perfect system—you’re picking the right compromises for the business goal.
Bank transfers lean CP because correctness trumps uptime. Social feeds lean AP because freshness and uptime beat strict ordering.
And in normal operation, PACELC nudges you to say how fast you want to respond versus how strongly you want to coordinate.
For interviews, this is gold.
The best answers don’t just drop acronyms; they make the trade-offs explicit and tie them to user impact.
When you hear “design X”, translate it right away: what happens if nodes can’t talk (partition)?
Do we stall writes or serve slightly stale reads?
When the network is fine, do we wait for multiple replicas or ship a quick response and reconcile later?
That’s CAP and PACELC—turned into crisp, product-aware decisions.
To dive deeper into these concepts, consider the DesignGurus.io resources.
Courses like Grokking System Design Fundamentals and Grokking the System Design Interview cover topics such as CAP theorem and consistency trade-offs, and the System Design Interview Roadmap provides a structured plan for practice.
These materials break down complex concepts with real-world examples and can boost your confidence for the interview.
FAQs
Q1: What is the CAP theorem in simple terms?
The CAP theorem says that a distributed system cannot guarantee consistency, availability, and partition tolerance all at once. If a network partition (a break in communication between nodes) occurs, the system must choose either to remain consistent (all data in sync across nodes) or to remain available (continue operating), but not both simultaneously.
Q2: What does PACELC stand for, and what does it add to CAP?
PACELC stands for “Partition – Availability or Consistency; Else – Latency or Consistency.” It extends CAP by addressing what happens when there is no network partition. In PACELC, if a partition occurs you must choose between availability and consistency, else (when no partition) you choose between latency and consistency. In short, PACELC adds a trade-off of speed (latency) vs. consistency during normal operation that CAP doesn’t cover.
Q3: How is PACELC different from the CAP theorem?
CAP deals only with the trade-off during a network partition (consistency vs. availability), whereas PACELC covers both that and the scenario when the network is healthy. In other words, PACELC = CAP’s partition-time choice + a latency-vs-consistency choice in normal operation.